VROV (Virtual Remotely Operated Vehicle)
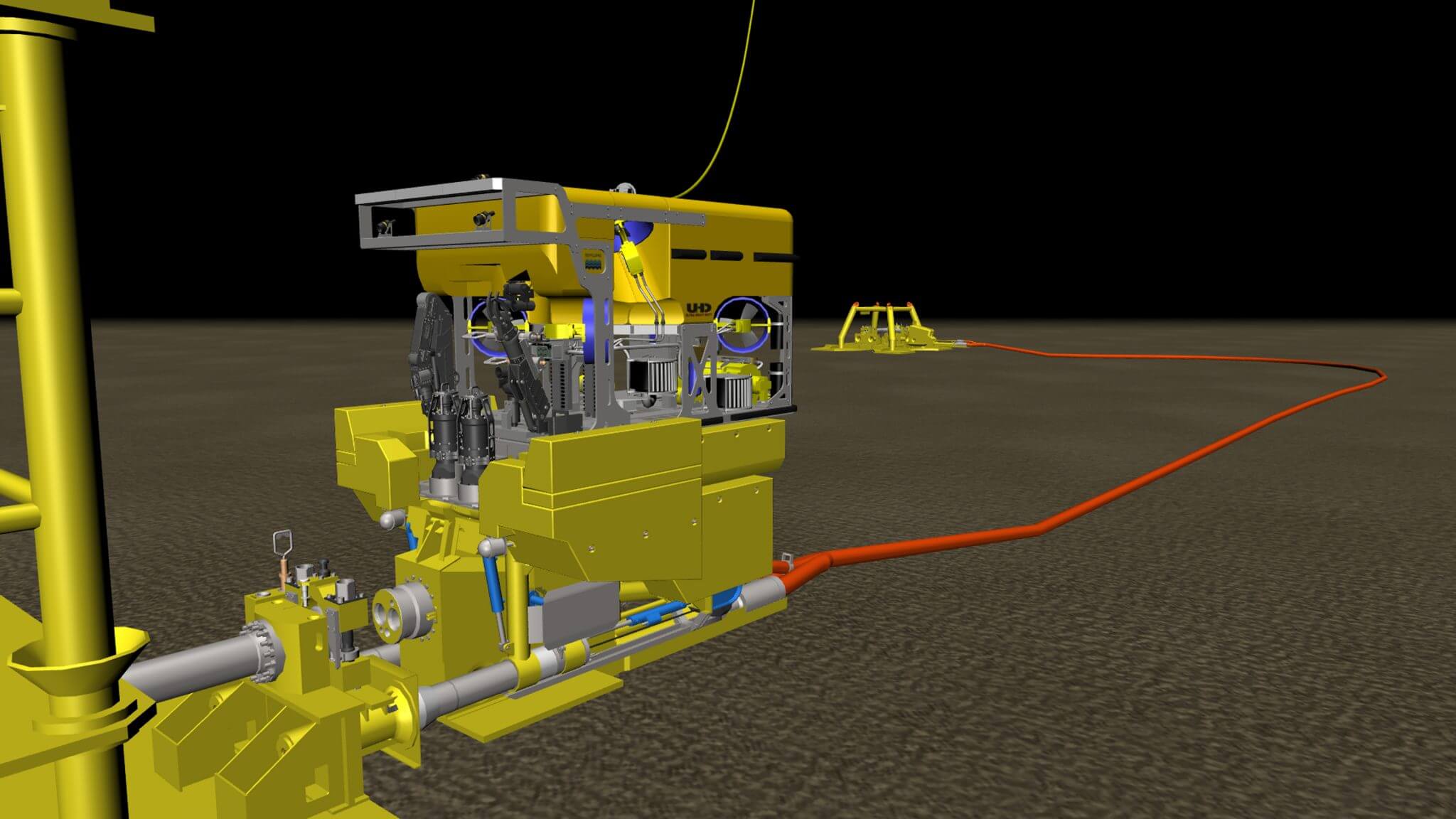
VROV is a 3D interactive real-time simulation system which supports the complete range of AUVs, Inspection and Work Class ROVs, and the full spectrum of sensor and intervention subsystems. Since 1999, VROV has set the standard in interactive, real-time subsea simulation, featuring fully interactive tether dynamics, manipulator functionality and high-fidelity sonar and graphics simulation.
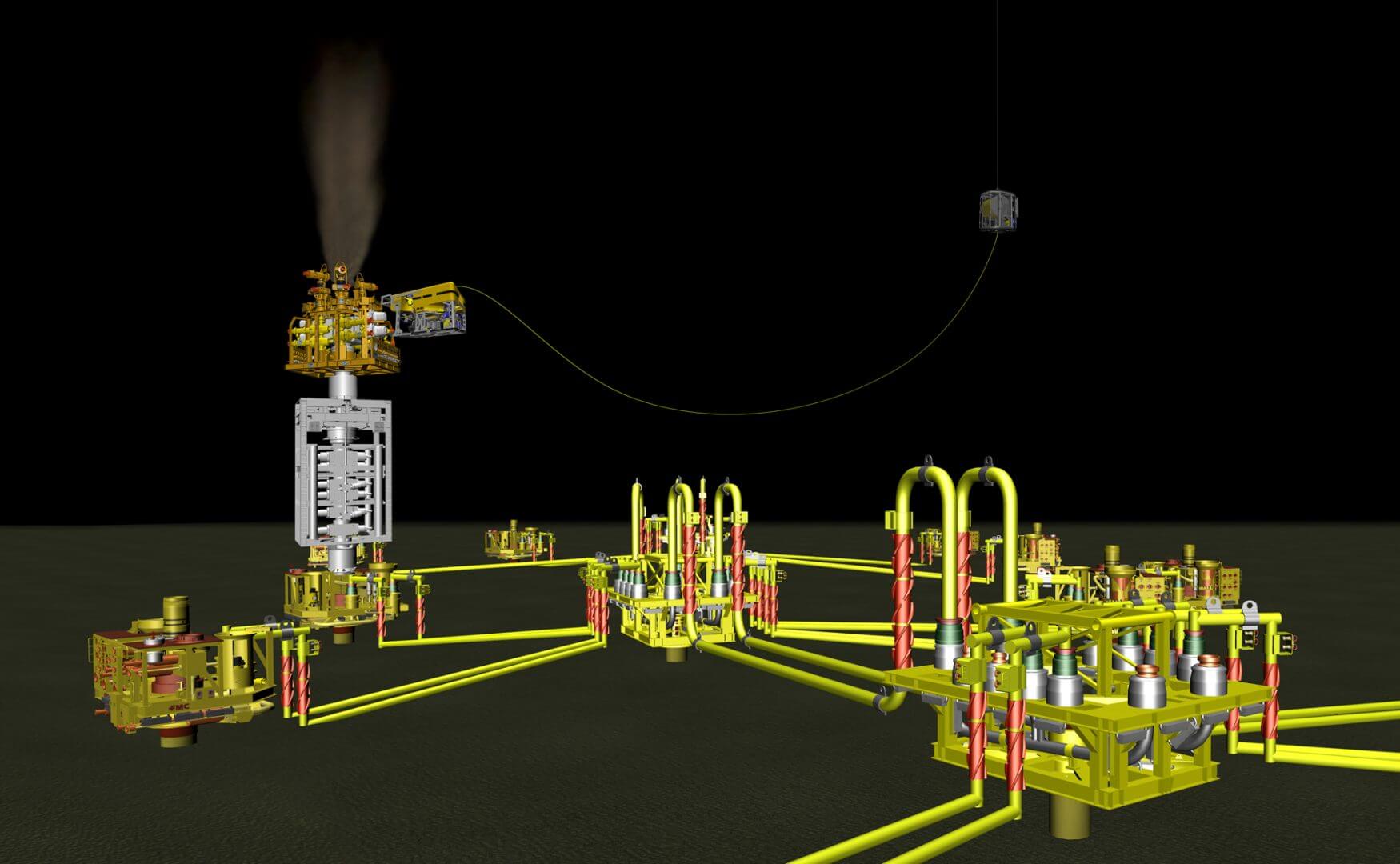
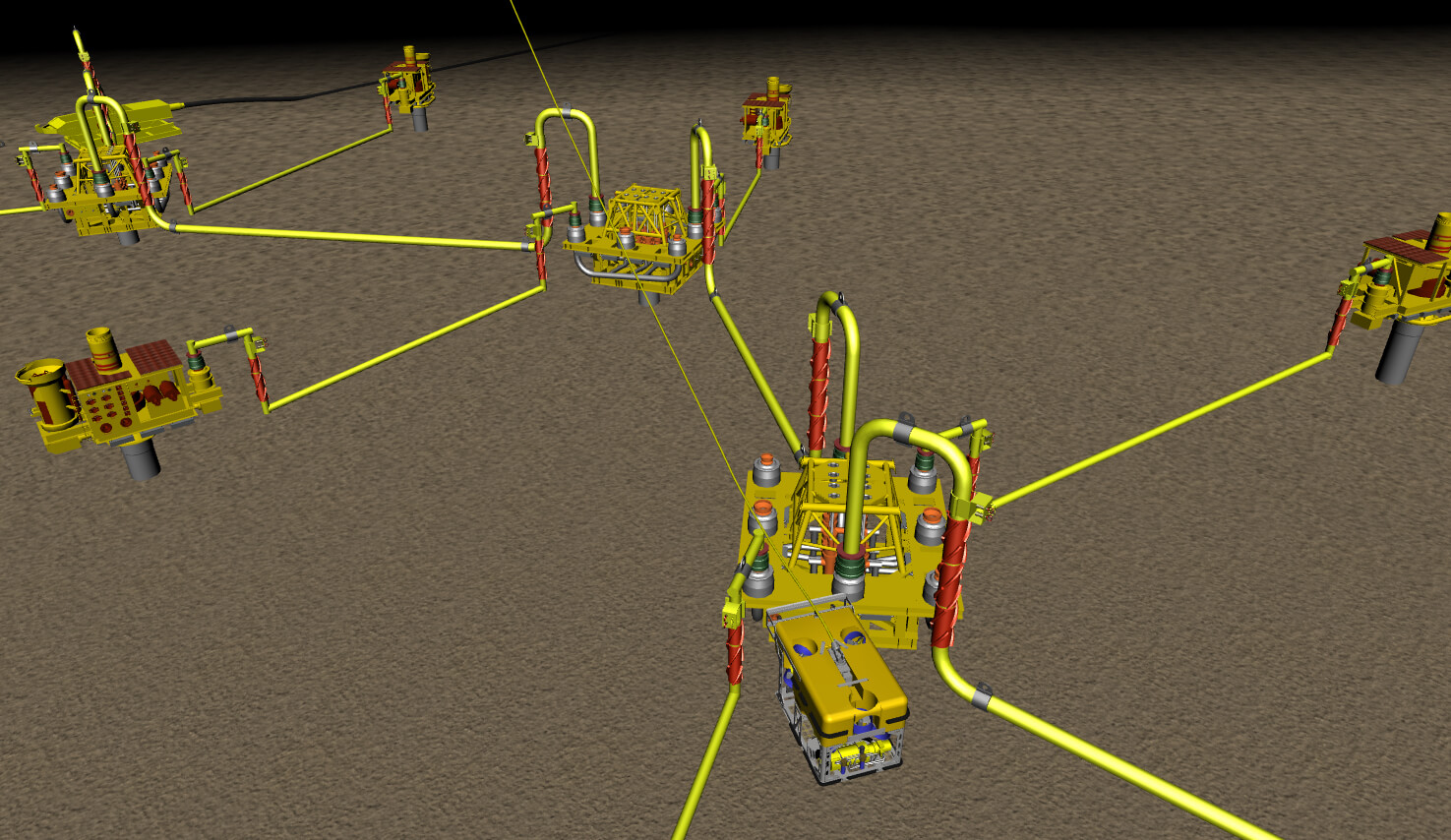
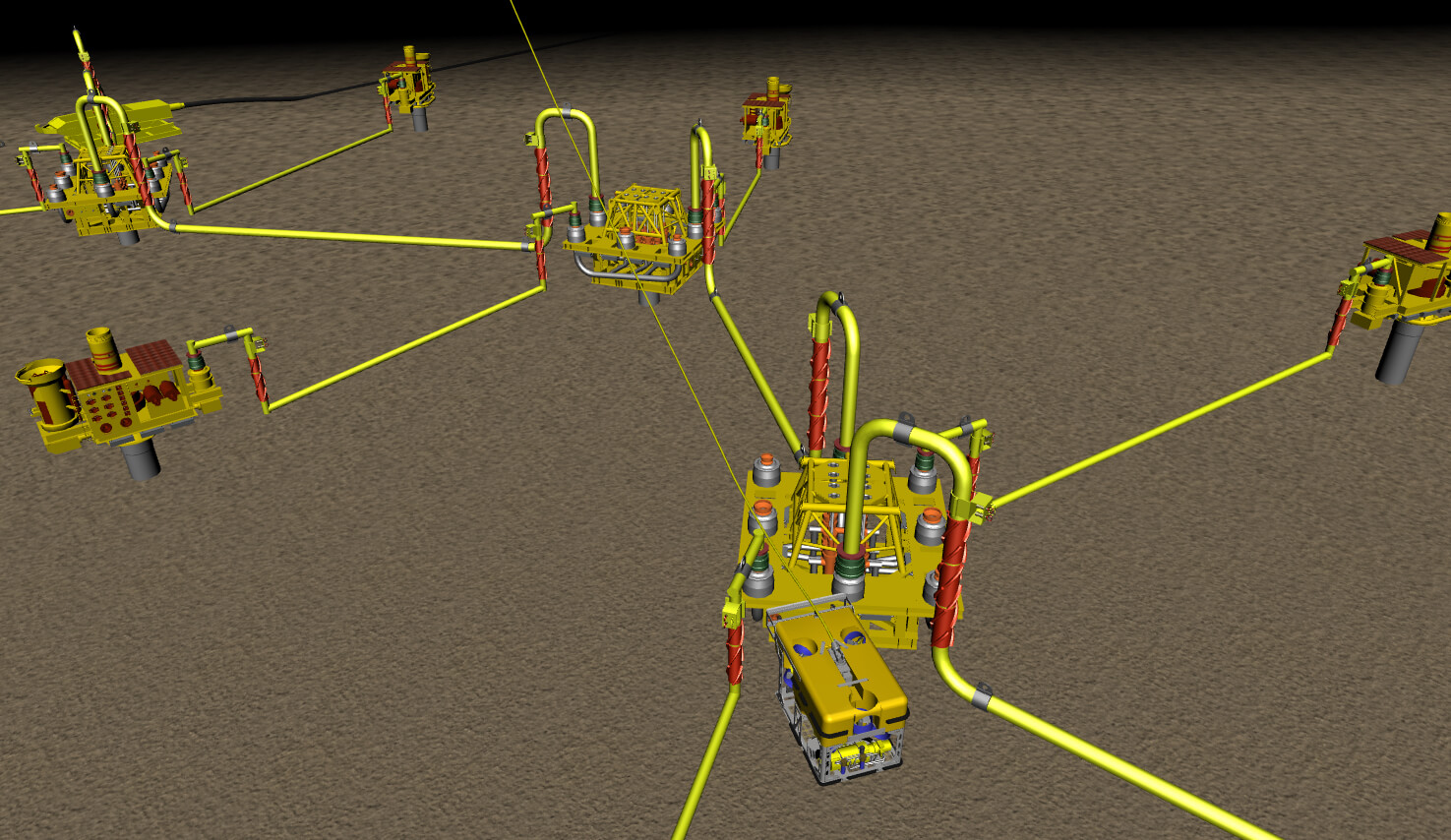
GRi’s VROV system offers engineering solutions that are based on high-fidelity simulation of systems and procedures. Because the virtual ROV simulator allows for mission rehearsals on a simulator system, an extensive amount of the risk involved with mission planning may be mitigated. This is achieved through an increased awareness of environmental and mechanical conditions, and a reliance on bathymetry data to offer full access to the simulation environment. Also, because VROV can be used to validate the design of individual components, it is a powerful tool for enhancing and refining the engineering process. Our ROV simulator has the ability to present a full-field layout and may be used to review the design of subsea equipment and procedures.
VROV gains its value as a risk deterrent through its environmental accuracy and responsiveness. This ROV simulator allows for the adjustment of all subsea environmental dynamics, and a simulation may be quickly replayed with new dynamic properties. Aside from environmental conditions, highly detailed collision dynamics and object interactions provide a realistic platform for the prevention of operational error.
VROV software provides a multi-faceted approach to engineering solutions, increasing project awareness and facilitating the integrated decision-making process. The software uses a three-tiered approach in providing solutions to complex subsea engineering problems:
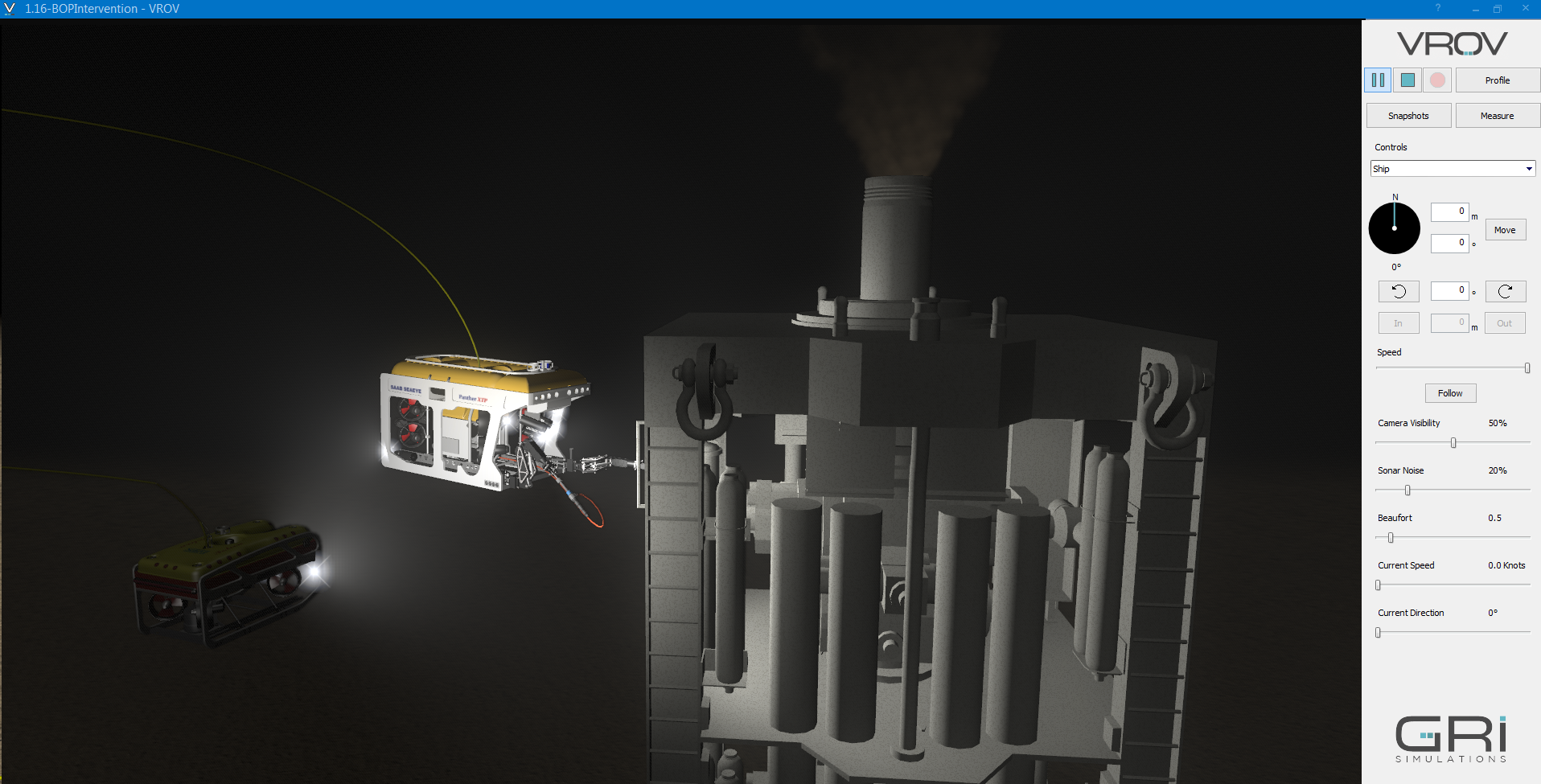
- Analysis Mode: This is the predictive mode of VROV, showing potential clashes and gaps between equipment and proposed procedures. VROV also provides for the modification of environmental conditions, continuous display of engineering data, and operational limits analysis.
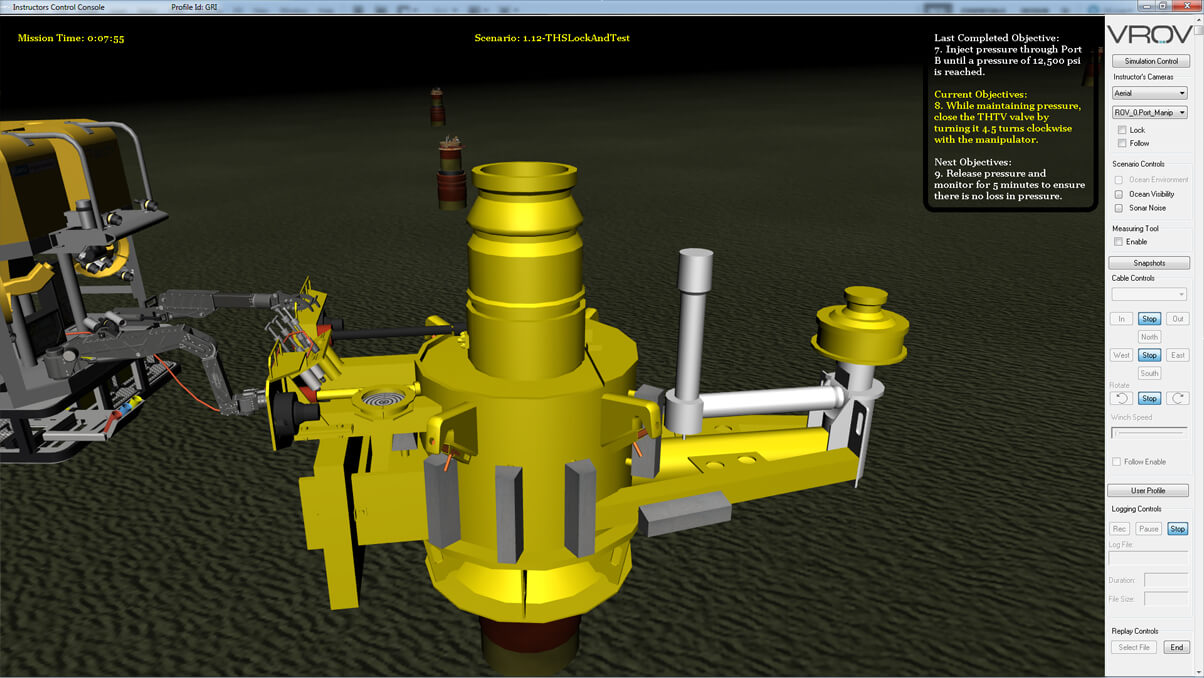
- Training Mode: This involves training to ensure the proper testing and validation of the capabilities of the analysis mode. The feasibility of operations and proposed procedures may be evaluated in the Front-End Engineering and Design stage of the development process.
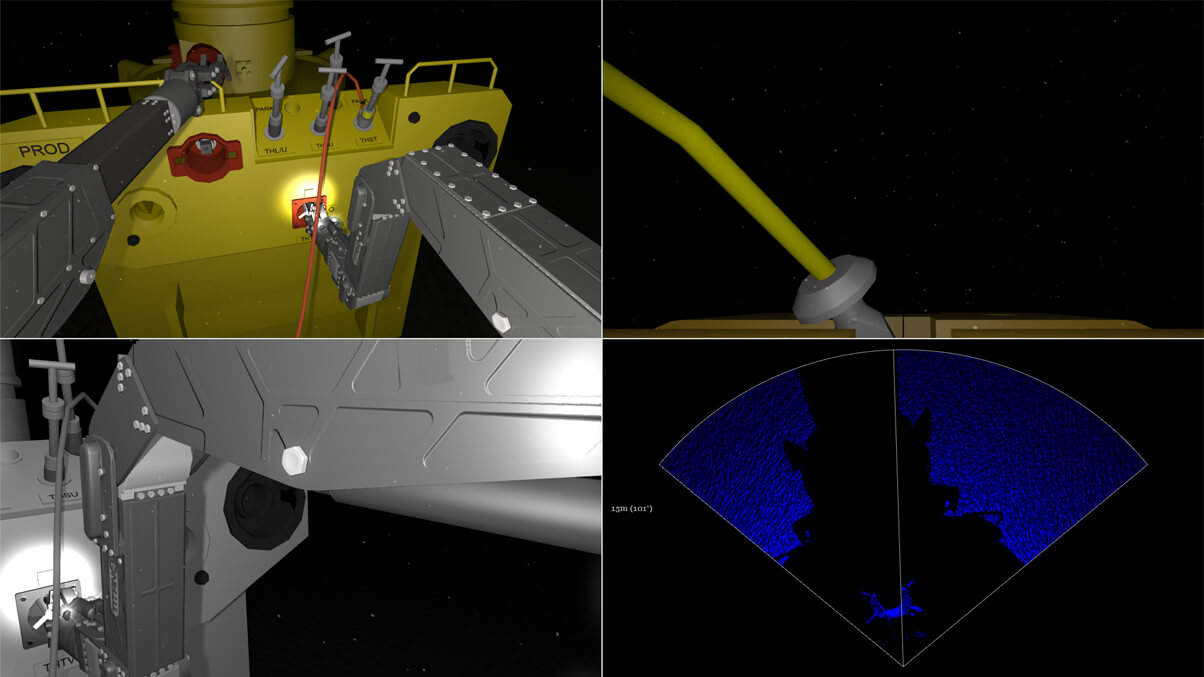
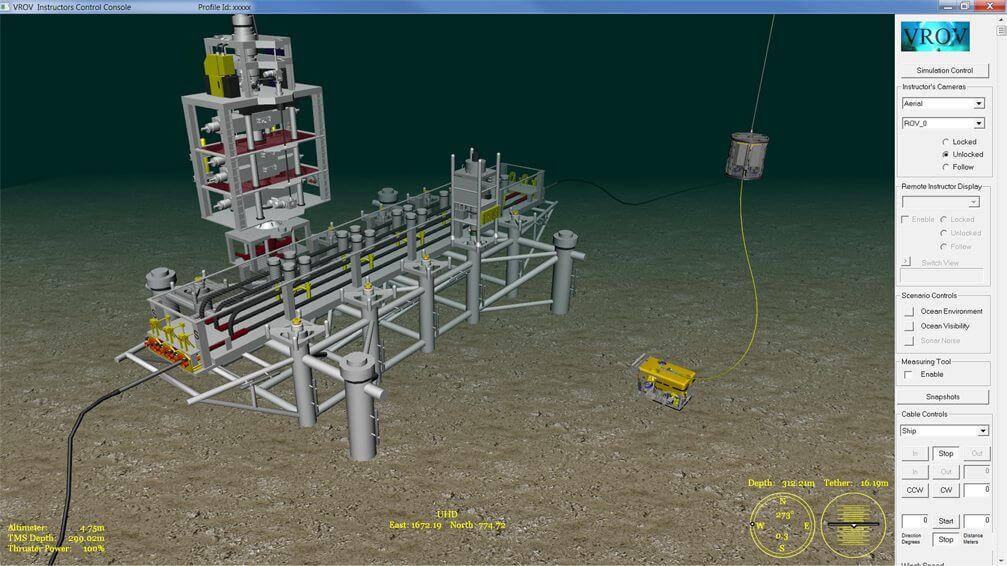
- Real-Time Visualization Mode: Acoustic positioning data and ship positional data display select engineering data in real time. VROV also supports RAO data to accurately simulate the positioning and action of ships and vessels. In addition, ocean simulation is based on wave spectrum and features reflections and transparency. This high fidelity approach to surface and subsea dynamics allows operators to transfer their knowledge from the simulation to the real-world dynamic with confidence.
The goal of the system continues to be the enhancement of the safety and productivity of marine assets and operations:
- As an instructional tool, VROV provides a cost-efficient opportunity for a trainee to gain valuable stick-time and operational familiarity while minimizing risk to personnel and ROV equipment.
- As a design and engineering tool, it consistently demonstrates its value in testing the form and function of subsea assets, including vehicles, tools and structures control software, and in facilitating training in operation and installation of assets.