 is here
is here
We’re excited to share all the great new and improved features available with VROV 5. VROV (Virtual Remotely Operated Vehicle) provides 3D, interactive simulation for complex marine operations. The system supports a diverse range of AUVs, Inspection and Work Class ROVs, along with a spectrum of sensor and intervention subsystems. With the launch of VROV 5, GRi has expanded the customization tools available for critical subsea training and analysis.
Intuitive New Look.
Resourceful New Features.
Through continued software optimization and support for advanced GPU APIs, GRi continues to improve graphics quality and runtime performance, while simultaneously allowing simulation of bigger more complex subsea environments, and control of more real-time environmental variables. These improvements reduce the visualization disconnects between simulation and the real ROV piloting experience.
New Lighting modes for higher visual quality have been introduced, including the implementation of Backscatter. Backscattering is created when particulates in the water are illuminated by a light source and is most commonly seen in the space between the lens of a camera and the subject underwater, observed by every ROV pilot viewing underwater cameras, this effects really contributes to the immersion and realism of the simulated ROV cameras.
The option for indirect illumination within the aerial (or instructor) view has also been introduced. Such global lighting adds a dimension of depth to subsea visualization.
You can now take advantage of features developed from our iDEA Field Development Kit. Import terrain and equipment files to generate custom 3D environments. The intuitive editor allows for equipment to be associated with snap points, making it easy to drag, drop and connect equipment models in VROV. When the scenario has been populated, switch to Simulator Mode to fly an ROV through the created environment. The real-time workflow allows greater emphasis on collaboration, planning iteration and making better decisions.
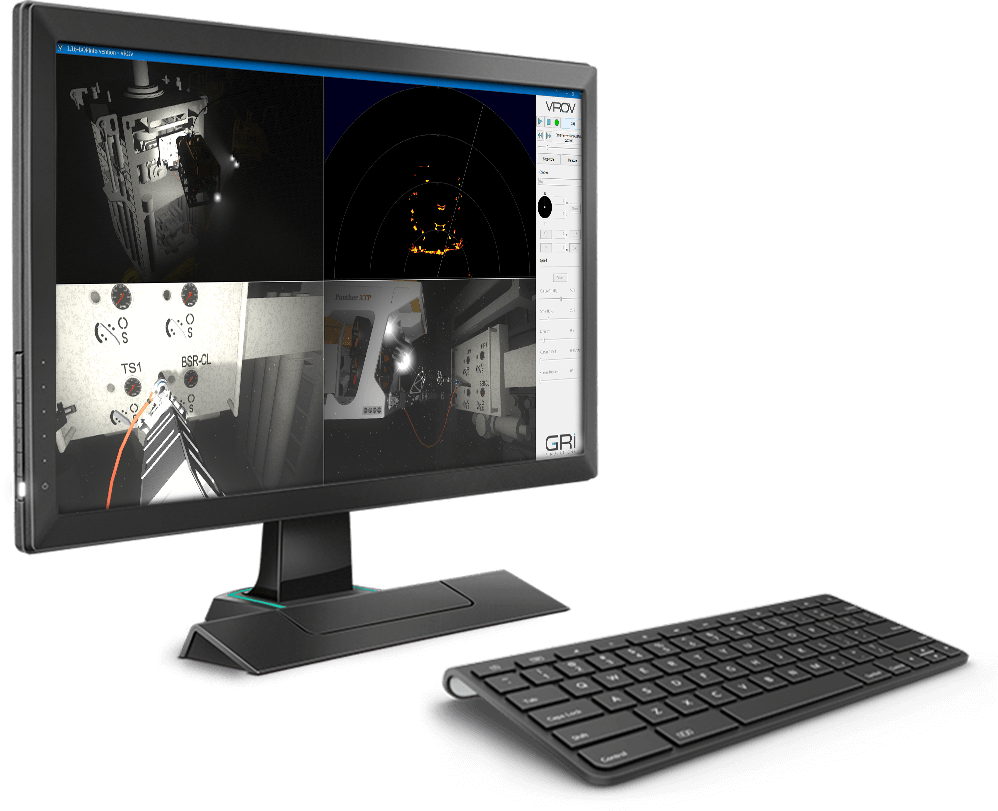
Redesigned User Interface
VROV 5.0 features a new user interface that is streamlined and modernized. Previously, the UI required the user to scroll down to access the entirety of available configurations. The new interface displays the entirety of available features in a single frame, with many features (such as camera visibility, sonar noise, and sea states) now controlled by simple slider menus.
Integrated Video Encoding
You can now quickly and easily create videos from log files, with no need for additional software. Our encoder uses the H.264 capture standard, which provides great video quality at substantially lower bit rates than previous formats.
3rd Party Software and ROV System Integrations.
GRi continues to develop integrations with industry leading controllers, sonar, and ROV systems. A plugin architecture has been developed to allow implementation of varied 3rd party software solutions. These integrations continue to enable project specific analysis of subsea systems and field designs.
The Ocean surface can be a very important part of a subsea solution. Huge strides have been made to our sea state dynamics physics and visuals. The system uses RAO data to recreate the movement of a vessel throughout launch and recovery operations and the subsequent scenario. Graphical improvements have been made to the ocean surface based on wave spectrum with reflections and transparency. All user controlled through interaction/beaufort controls.
Some subsea procedures require complexity beyond the capability of one ROV. VROV now incorporates the newest GRiP (GRi Physics Engine) capabilities and sonar support to enable multiple vehicles and vessels, from surface to subsea, to operate in a single simulation scenario. The system’s team-training opportunities promote the determination of best practices and completion of joint operations through in-flight communication training and collaborative dive plan creation. Examples of operations include large-scale well response operations and mine-countermeasures procedures.